This is a follow-on from WSPR Transmitter — keeping time.
Every two minutes the transmitter code optionally transmits a message as a sequence of WSPR tones.
First the frequency to transmit on is decided—this is a round-robin though the amateur HF bands. Whether a frequency is transmitted on was decided during the initial configuration via a UART connection. The decisions were stored in EEPROM and copied to ESP8266 memory from there.
The LPF is configured to filter appropriately for this frequency. More on this is a later post.
A random offset is added to the transmit frequency to minimise collisions with other transmissions.
The tones are then transmitted which takes most of the two minute interval. The tones to be transmitted have been compiled into the code as an array using a useful tool. Thanks Scott! The tones are for particular output power. If the output power were changed the code would need to be recompiled. The AD9850 frequency tuning word (FTW) is loaded with the frequency (RF + AF) that is to be transmitted. The code waits for the length of a tone and repeats for subsequent tones. When all the tones to be transmitted in this interval have been transmitted the AD9850 FTW is loaded with zero which stops the AD9850 from transmitting.
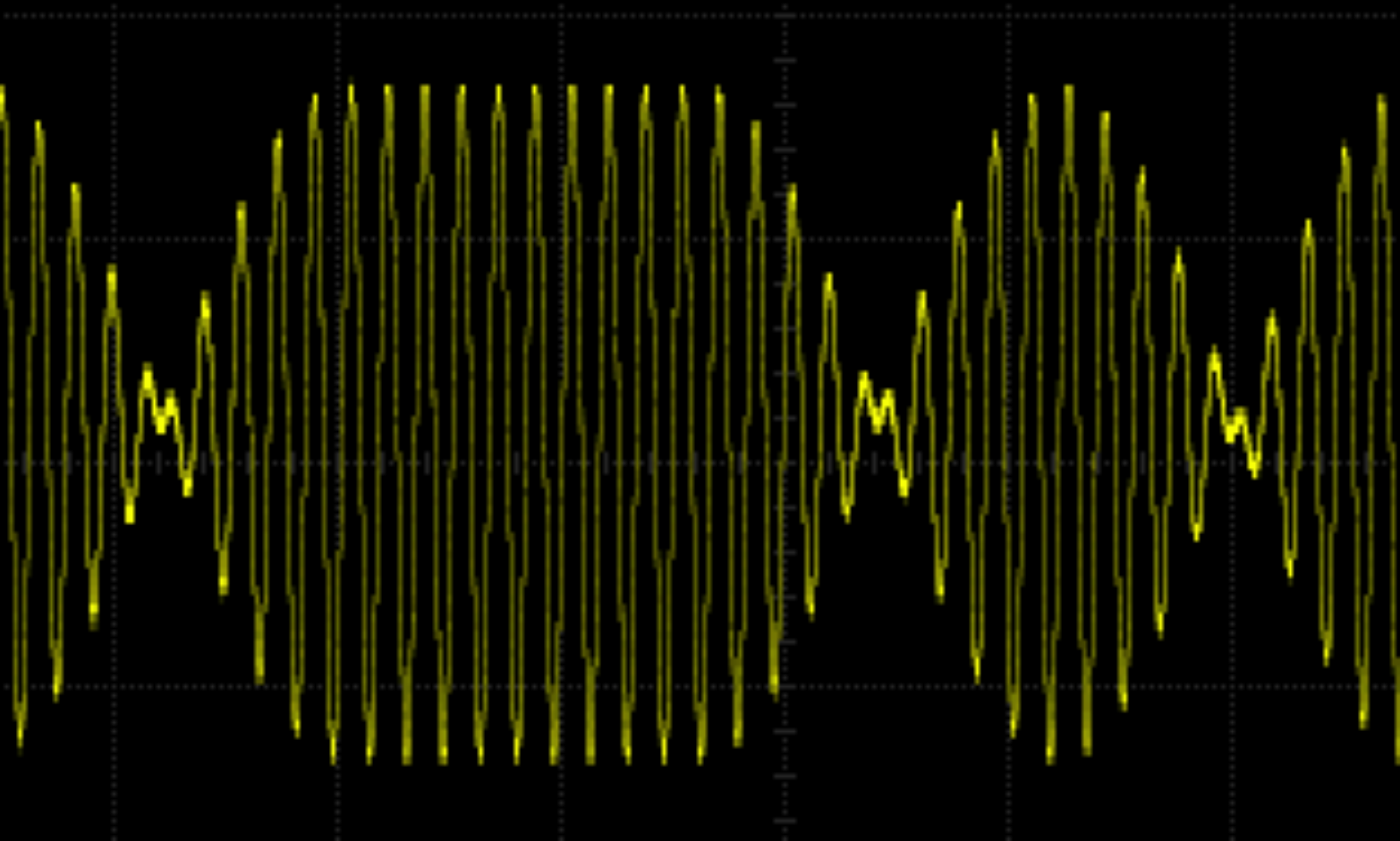
The AF tone part of the frequency is according to the WSPR User’s Guide Appx B: The keying rate is 12,000/8192 = 1.4648 baud. The modulation is continuous phase 4-FSK with a tone separation of 1.4648 Hz. It occupies 6 Hz. Continuous phase means the phase isn’t set to zero at the start of a symbol. 4-FSK means it uses four tones.
With an AD9850 reference clock of 125 MHz you get 125^6 / 2^32 = 0.0291 Hz resolution. For WSPR we want 1.4648 Hz or better resolution so the reference clock can be as low as 125^6 x (0.029 / 1.4648) = 2.4836 MHz. The AD9850 can cope easily with this requirement.
Next up is how the LPF band switching is carried out …







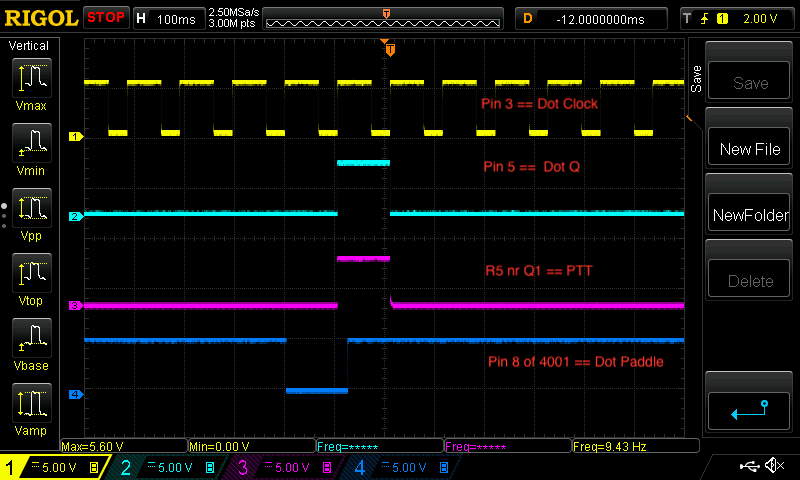


 The circuit works as follows. The morse key is attached to the JP1-KEY pin and when the key is keyed it grounds R2 making Q1 switch on. The 555 timer is configured as a multivibrator triggered through D1. The square wave output goes to JP2-HEADPHONE pin.
The circuit works as follows. The morse key is attached to the JP1-KEY pin and when the key is keyed it grounds R2 making Q1 switch on. The 555 timer is configured as a multivibrator triggered through D1. The square wave output goes to JP2-HEADPHONE pin. The nanoVNA sweep is quite slow so you need to have a fairly wide sweep span so that you can see the dip in SWR when you are tuning the loop. So you set the centre frequency and then the span and then tune until you see the dip disappearing off one end. Then you fine-tune the loop and end up with the dip at the centre frequency. The loop is now tuned as in the photo above.
The nanoVNA sweep is quite slow so you need to have a fairly wide sweep span so that you can see the dip in SWR when you are tuning the loop. So you set the centre frequency and then the span and then tune until you see the dip disappearing off one end. Then you fine-tune the loop and end up with the dip at the centre frequency. The loop is now tuned as in the photo above.